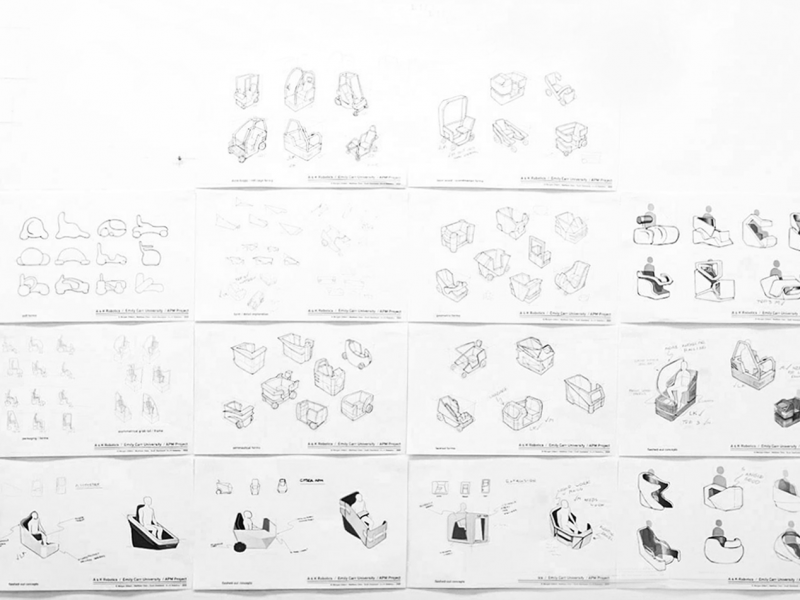
Led by Scott Staniland, the research project engages a team of Emily Carr designers to research and develop a physical prototype for a one-person Autonomous People Mover that will operate in indoor public spaces.
Between November 2019 and June 2020, the team will ideate solutions to the problem space and connect with existing or new user research; research design elements (product use, fit, function and aesthetics) and produce a range of initial design solutions relating to the prototype; develop a range of functional prototypes in specified materials and utilizing applicable analogue and digital technologies and finalize plans for the production of refined prototype.
Project Team: Scott Staniland, Matthew Chen, Morgan Gilbert
Project Partner: A&K Robotics
Partially funded by The National Research Council of Canada Industrial Research Assistance Program.